The odometer reading for LV Tong LSV’s is stored on the firmware of the instrument cluster. There is currently not a documented way to flash the firmware of the Hefei Huanxin Technology Development Company cluster. However, the odometer is calculated based on the speed sensor signal which can be emulated. By using a signal generator at a high frequency, you can increase the odometer reading of the cluster.
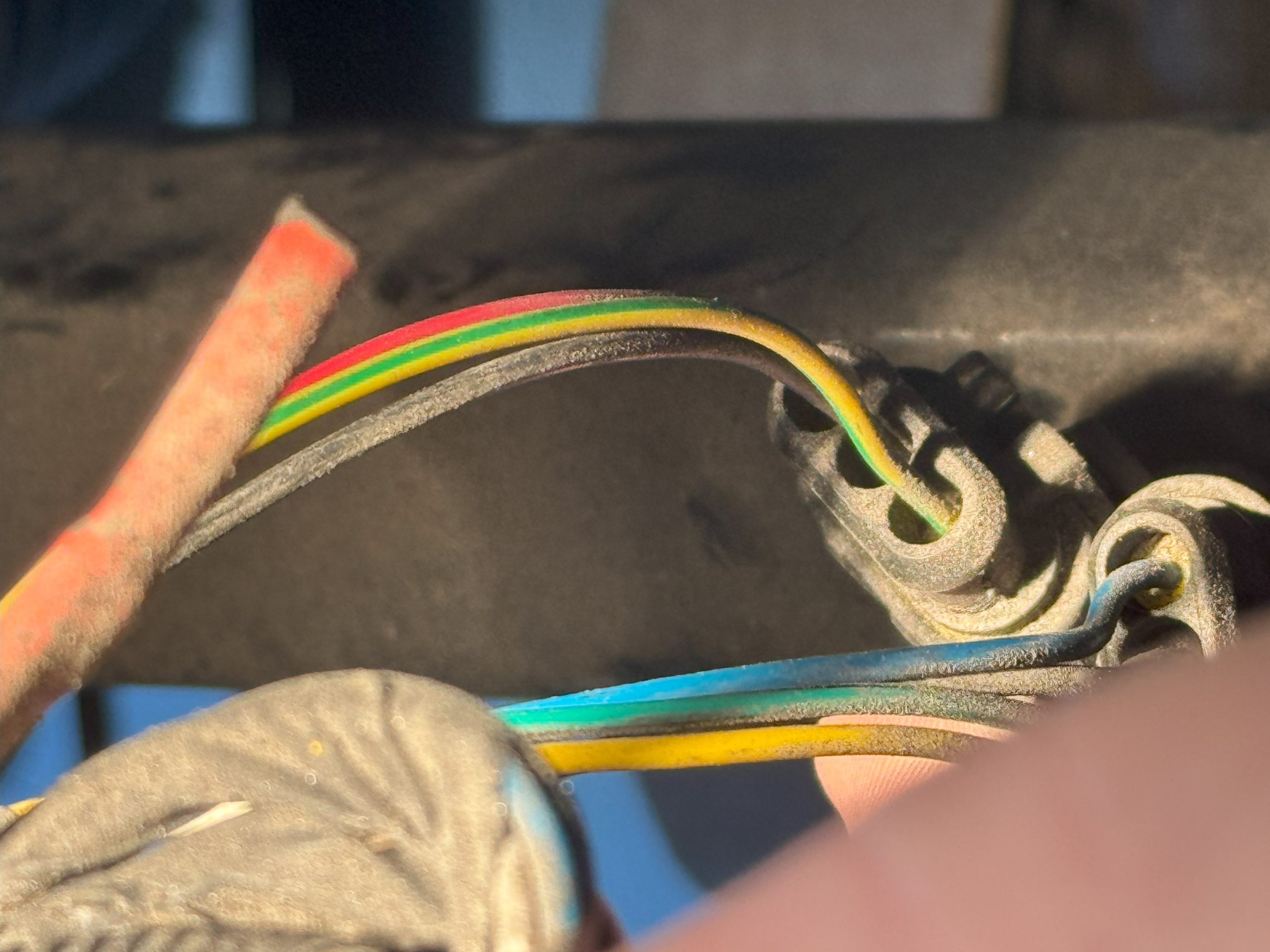
The speed signal is carried on the yellow/green wire connected to pin 1 of J1 on the cluster. Connect the output of a signal generator to this pin (I used the EspoTek Labrador attached to my Surface Go for this) using at least a 3V square wave (the speed sensor on the LSV outputs 12V, but the cluster seems to detect anything over 3V). Be sure your signal generator’s ground is connected to same ground as the power supply otherwise the cluster may not properly detect the signal. The maximum frequency will depend on your specific firmware but the cluster doesn’t seem to be able to process speeds above ~860mph – setting a frequency that generates a speed higher than this doesn’t seem to matter. For mine (580mm tire diameter, 14:1 gear ratio, 4 pulses per rotation) the maximum frequency it could sustain was 13.5kHz (~1000mph).